주행타입 목록

주행타입 안내
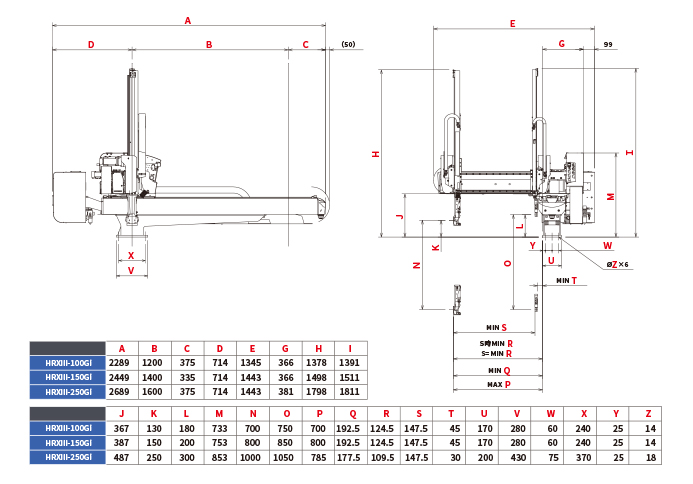
HRXⅢ-100/150/250Si·Gi
| MODEL | HRXⅢ-100Si | HRXⅢ-100Gi | HRXⅢ-150Si | HRXⅢ-150Gi | HRXⅢ-250Si | HRXⅢ-250Gi |
|---|---|---|---|---|---|---|
| 메인상하스트로크(mm)Main Arm Stroke | 700[800][900] | 800[900][1000] | 1000[1100] | |||
| 서브상하스트로크(mm) Sub Arm Stroke | - | 750[850][950] | - | 850[950][1050] | - | 1050[1150] |
| 메인전후스트로크(mm)Main Kick Stroke | 575.5(124.5~700) | 507.5(192.5~700) | 675.5(124.5~800) | 607.5(192.5~800) | 675.5(109.5~785) | 607.5(177.5~785) |
| 서브전후스트로크(mm) Sub Kick Stroke | - | 507.5(45~552.5) | - | 607.5(45~652.5) | - | 607.5(30~637.5) |
| 횡주행스트로크(mm)Traverse Stroke | 1200[1400][1600] | 1400[1600][1800][2000] | 1600[1800][2000] | |||
| 메인대기위치(mm)Main Arm Home Position | 130 | 130 | 150 | 150 | 250 | 250 |
| 메인최대전진위치(mm)Main Arm Maximum Reach | 700 | 800 | 785 | |||
| 서브최소접근위치(mm) Sub Arm Minimum Reach | - | 45 | - | 45 | - | 30 |
| 자세제어(°)Wrist Unit | 90 | |||||
| 자세토크(Nm)Wrist Torque | 22.7 | |||||
| 최대가반제품질량(kg)Maximum Payload | 7 (어태치먼트 포함)7 (including EOAT) | |||||
| 본체무게(kg)Weight | 241 | 258 | 255 | 275 | 290 | 313 |
| 전고x횡폭x안쪽길이(mm)Overall WxDxH | 2289x1345x1378 | 2289x1345x1391 | 2449x1443x1498 | 2449x1443x1511 | 2689x1443x1798 | 2689x1443x1811 |
| 상용공기압(MPa)Working Air Pressure | 0.5 | |||||
| 에어소비량 (ℓ/cyc[ANR]) ※Air Consumption ※ | 1.15 | 1.17 | 1.15 | 1.17 | 1.15 | 1.17 |
| 제어방식Control Method | 디지털 AC 서보모터Digital AC servo motor (3/5 axels) | |||||
| 전원(V)Power Supply | 3상 AC200V-220V±10%(50Hz/60Hz)3-phase/Single phase AC200V-220V±10%(50Hz/60Hz) | |||||
| 최대소비전력(W)Maximum Power Consumption | 1700 | 2300 | 1700 | 2300 | 1700 | 2300 |
| 전원설비용량(VA)Power Equipment Capacity | 2600 | 2800 | 2600 | 2800 | 2600 | 2800 |
| 최대소요전류(A)Maximum Current Consumption | 7.5 | 8.0 | 7.5 | 8.0 | 7.5 | 8.0 |
※ 흡착 에젝터 사용시에는 1연 추가마다 46ℓ/min[ANR]가 별도로 소비[ ] = 옵션